Kalibrierungsstation
Hauptmerkmale
- Kalibriert jede Art von Optik zuverlässig
- Erfasst Millionen von Referenzpunkten pro Pose
- ML-gestützte Filterung fehlerhafter Daten für optimale Kalibrierungsergebnisse
- Export in branchenübliche Formate wie OpenCV oder als pixelgenaue Sichtstrahl-Lookup-Tabelle
- Umfassende Werkzeuge zur Qualitätskontrolle
- Ideal für Forschung & Entwicklung, DIY-Projekte und Kleinserien. Präzise metrologische Kalibrierung an identischen Positionen und unter gleichen Bedingungen
Die Station arbeitet nach dem Active-Target-Prinzip: Ein Flachbildschirm zeigt eine Abfolge codierter Muster, die Kamera erfasst diese synchron, und das System dekodiert die Bilder. So werden selbst kleinste Details der Kamerageometrie sichtbar. Die Rohdaten können direkt für eigene Kalibrierungsprozesse genutzt werden, oder Sie profitieren von unserer ML-gestützten geometrischen und kolorimetrischen Kalibrierung.


Ausstattung der Station
- Flacher, vorkalibrierter Bildschirm
- Mac Mini oder vergleichbarer PC
- Vorinstalliertes Radiant Metrics Calibration Studio
- Eine Kamera für Tests und Wartung


Umfangreiche Datenerfassung
- Für jeden Kamerapixel wird ein 3D-Referenzpunkt bestimmt
- Jeder Punkt enthält eine unverzerrte Unsicherheitsabschätzung
- Photometrische Sensitivitätscharakterisierung pro Pixel
- Für eine 12-MP-Kamera bis zu 12 Millionen Referenzpunkte pro Pose

Wir verwenden Kosinusmuster zur Codierung jedes Monitorpixels und liefern so eine dichte Menge an Referenzpunkten für die Kamerapixel.


ML-gestützte geometrische Kalibrierung
- Unterstützt alle Kameramodelle: OpenCV, ROS, Halcon, individuelle Free-Form-Modelle (pixelgenaue Sichtstrahl-LUT) u.v.m.
- Unterstützt alle optischen Designs: Perspektivisch, Fisheye, Katadioptrisch, Telezentrisch und mehr
- Quantifizierte Konsistenz, Zuverlässigkeit und Wiederholbarkeit: automatisches Entfernen von Ausreißern, Train/Test-Split, k-fache Kreuzvalidierung
- Intelligente Modellauswahl: Das System wählt das optimale Kameramodell basierend auf aufgabenspezifischen Toleranzen und erkennt Über- oder Unteranpassung
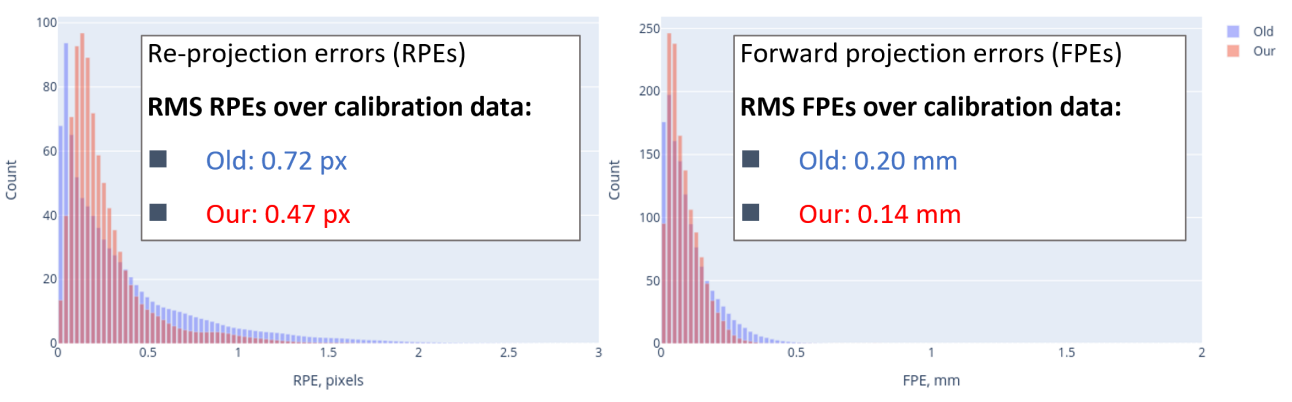
Ein Vergleich zwischen traditioneller Schachbrettkalibrierung und unserem Kosinusmuster-Ansatz für hochwertige Industriekameras mit Zentraloptik.
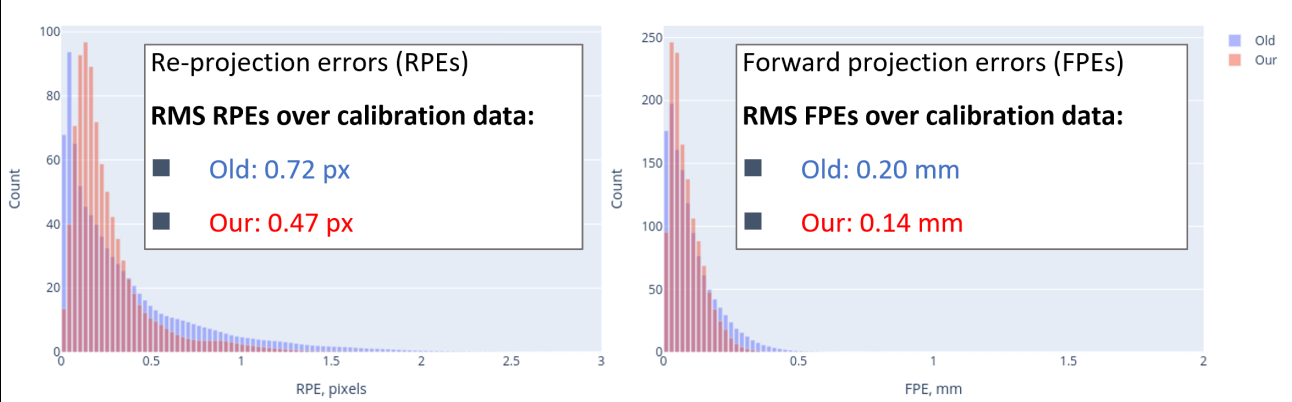
Ein Vergleich zwischen dem OpenCV-Kalibrierungsmodell und unserer Free-Form-Pixelgenauen Sichtstrahl-LUT zeigt deutliche Leistungsverbesserungen für Weitwinkelkameras. Das folgende Beispiel verwendet eine Raspberry Pi Weitwinkelkamera.


Erweiterte Qualitätskontrolle
- Datenqualität: visuelle Karten der Dekodierungsunsicherheiten
- Modell-zu-Daten-Konsistenz:
- RMS-Reprojektionsfehler (RPE)
- RPE-Verteilungskarten
- RMS-Fehler der Vorwärtsprojektion (FPE)
- FPE-Verteilungskarten
- Modellzuverlässigkeit: RPE/FPE gemessen an Testdaten
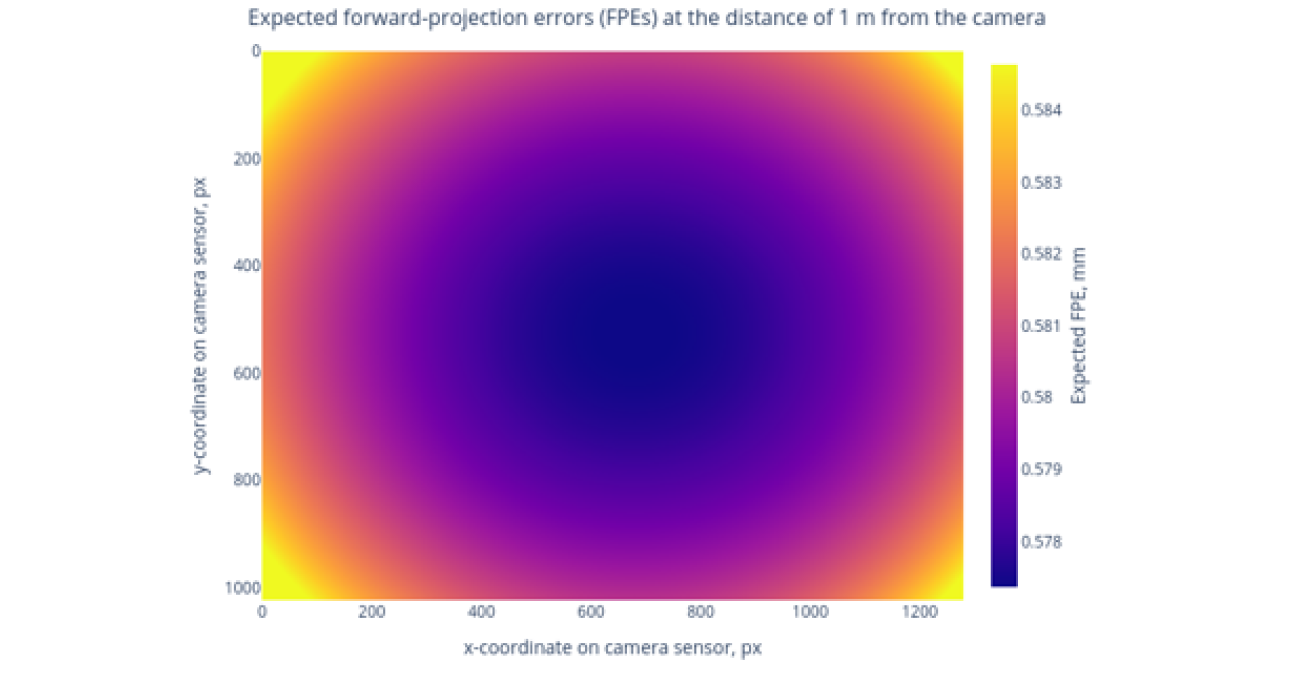
- Modellwiederholbarkeit: Karten des erwarteten FPE — Unsicherheit des Sichtstrahls jedes Pixels in einer bestimmten Entfernung
Beispiel für den Reprojektionsfehler in jedem Kamerapixel.
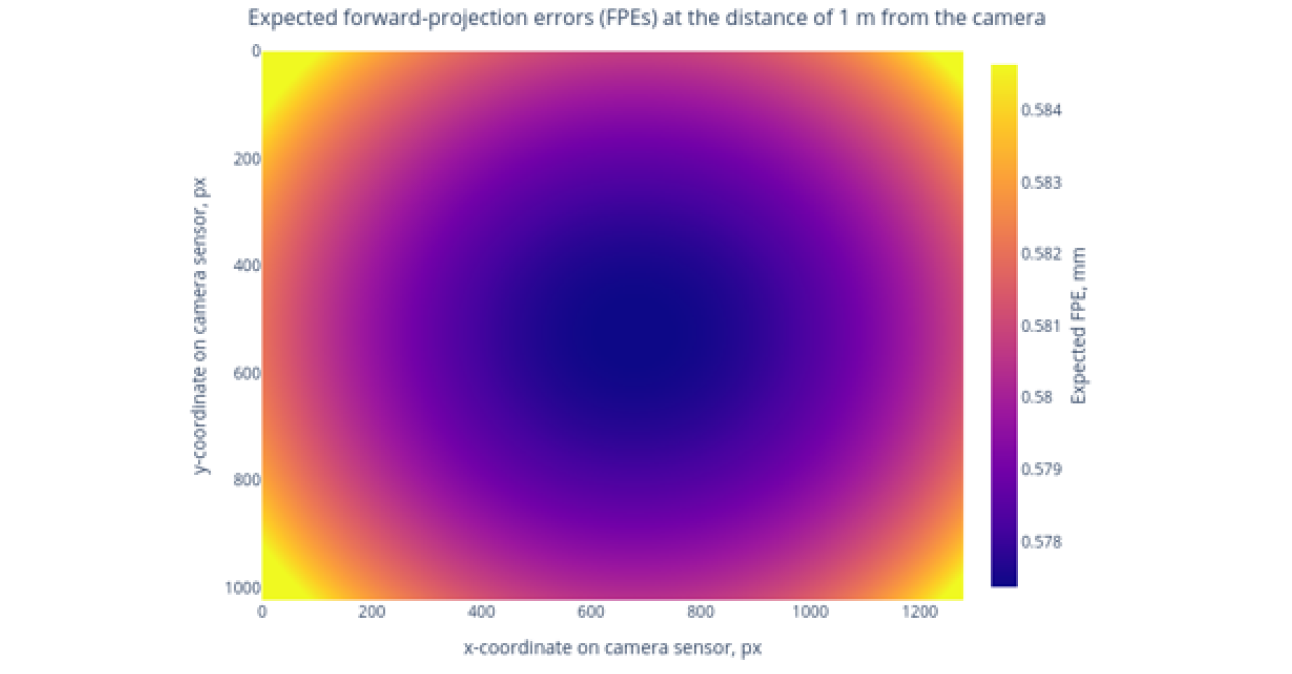
Beispiel für den Vorwärts-Reprojektionsfehler jedes Kamerapixels in Abhängigkeit von der Entfernung.
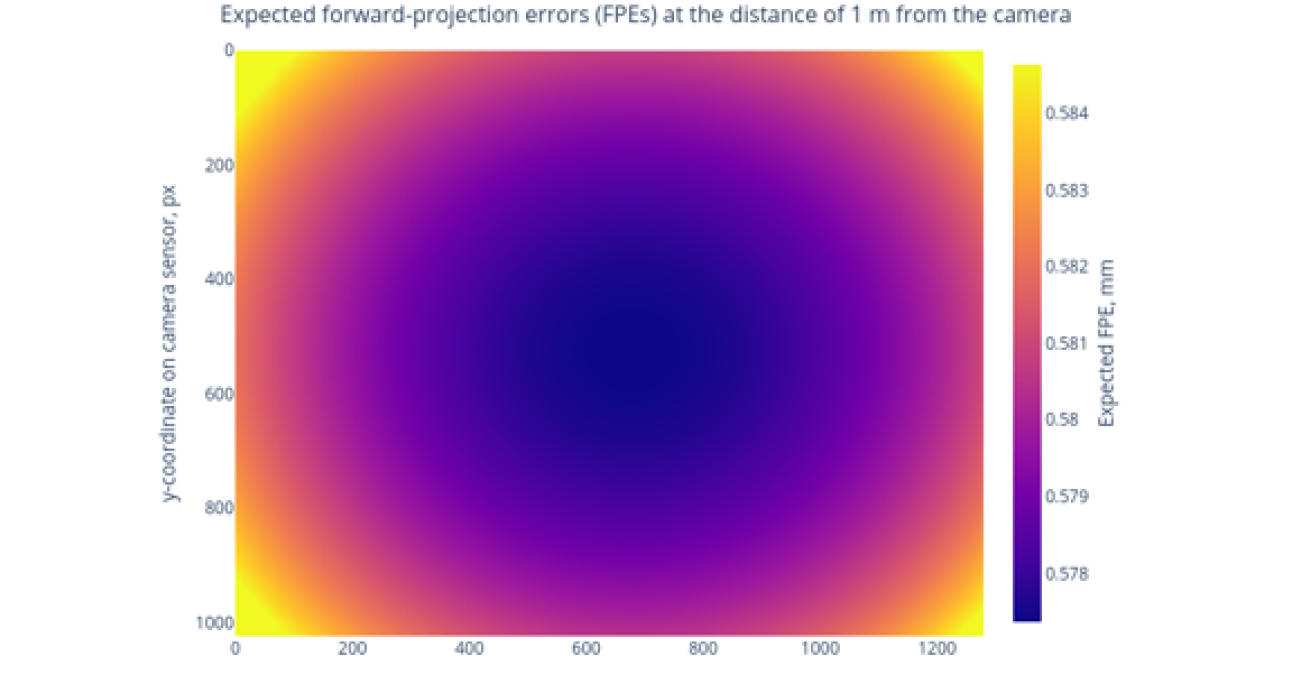
Beispiel für den erwarteten Vorwärts-Reprojektionsfehler jedes Kamerapixels in Abhängigkeit von der Entfernung.