Calibration Station
Main Features
- Calibrates any type of optics
- Captures millions of reference points per pose
- ML-based filtering of corrupted data for the best calibration results
- Exports to industry-standard formats such as OpenCV, or to a pixelwise view-ray lookup table
- Advanced quality assessment tools
- Suitable for R&D, DIY projects, and small-batch productionMetrological calibration completed at identical positions, in the identical environment
The station is built on the active target method: a flat screen displays a sequence of coded patterns, the camera captures them in sync, and the system decodes the images. This approach reveals minute details of the camera's imaging geometry. You can use the raw decoded data for your own calibration pipelines or apply our ML-based geometric and colorimetric calibration.


What the Station Includes
- Flat pre-calibrated screen
- Mac Mini or similar PC
- Preinstalled Radiant Metrics Calibration Studio
- A camera for testing and maintenance


Rich Data Collection
- A 3D reference point is determined for every camera pixel
- Each point comes with an unbiased uncertainty estimate
- Per-pixel photometric sensitivity characterization
- For a 12 MP camera, up to 12 million reference points per pose

We use cosine patterns to encode each monitor pixel, providing a dense set of reference points for the camera pixels.


ML-Based Geometric Calibration
- Supports any camera model: OpenCV, ROS, Halcon, custom free-form (pixelwise view-ray LUT), etc.
- Supports any optical design: perspective, fisheye, catadioptric, telecentric, and more
- Quantified consistency, reliability, and repeatability: automated outlier rejection, train/test split, k-fold cross-validation
- Smart model selection: the system chooses the optimal camera model based on task-specific tolerances and detects over/underfitting
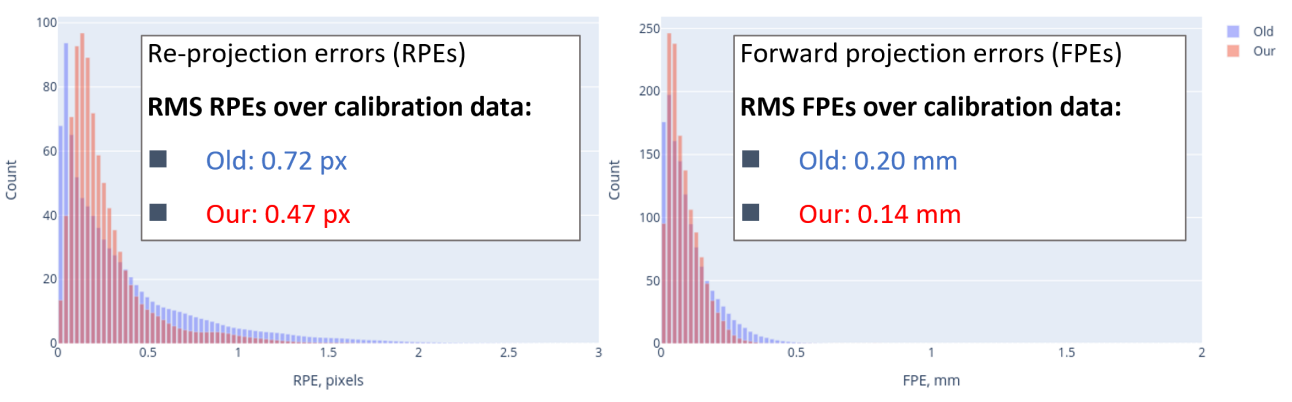
A comparison between traditional checkerboard calibration and our cosine-pattern approach for high-quality industrial cameras with central optics.
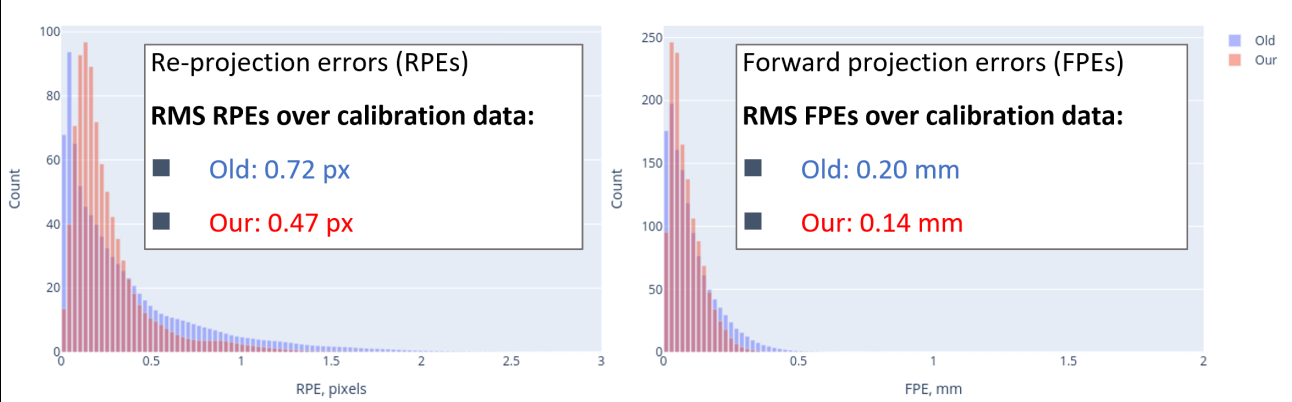
A comparison between OpenCV’s calibration model and our free-form pixelwise view-ray lookup table shows significant performance improvements for wide-angle cameras. The example below uses a Raspberry Pi wide-angle camera.


Extended Quality Control
- Data quality: visual maps of decoding uncertainties
- Model-to-data consistency:
- RMS reprojection errors (RPE)
- RPE distribution maps
- RMS forward projection errors (FPE)
- FPE distribution maps
- Model reliability: RPE/FPE measured on test data
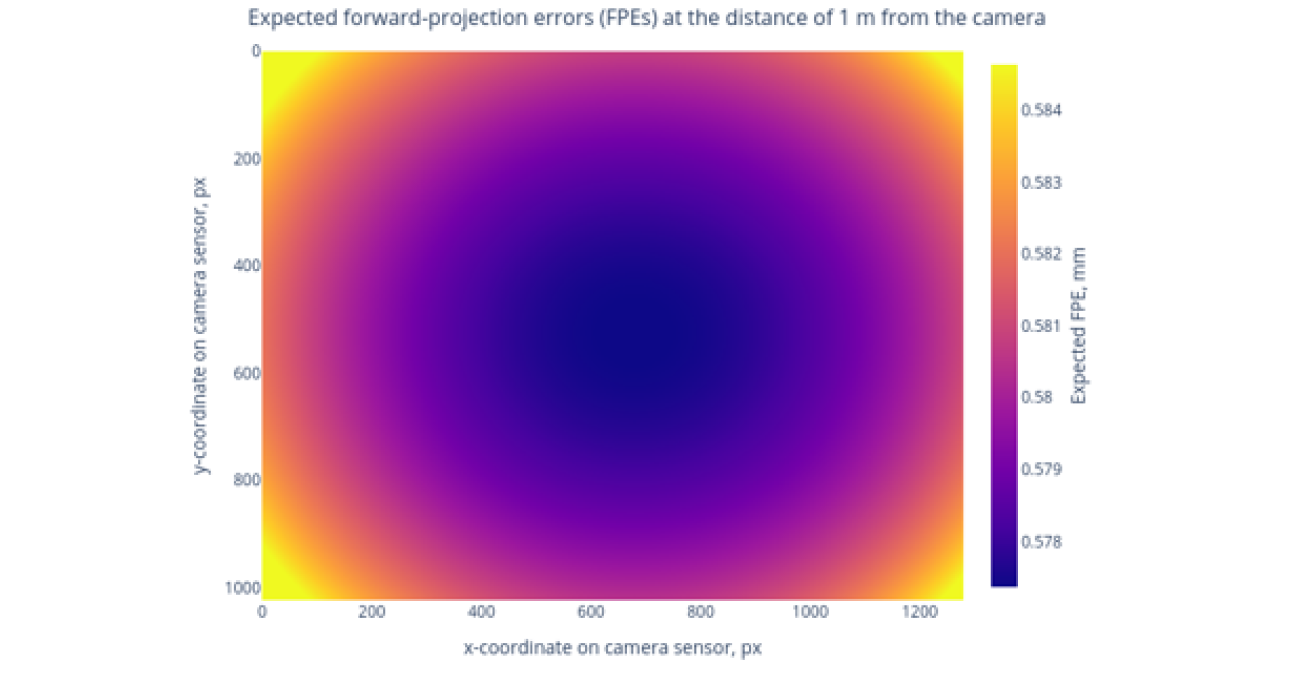
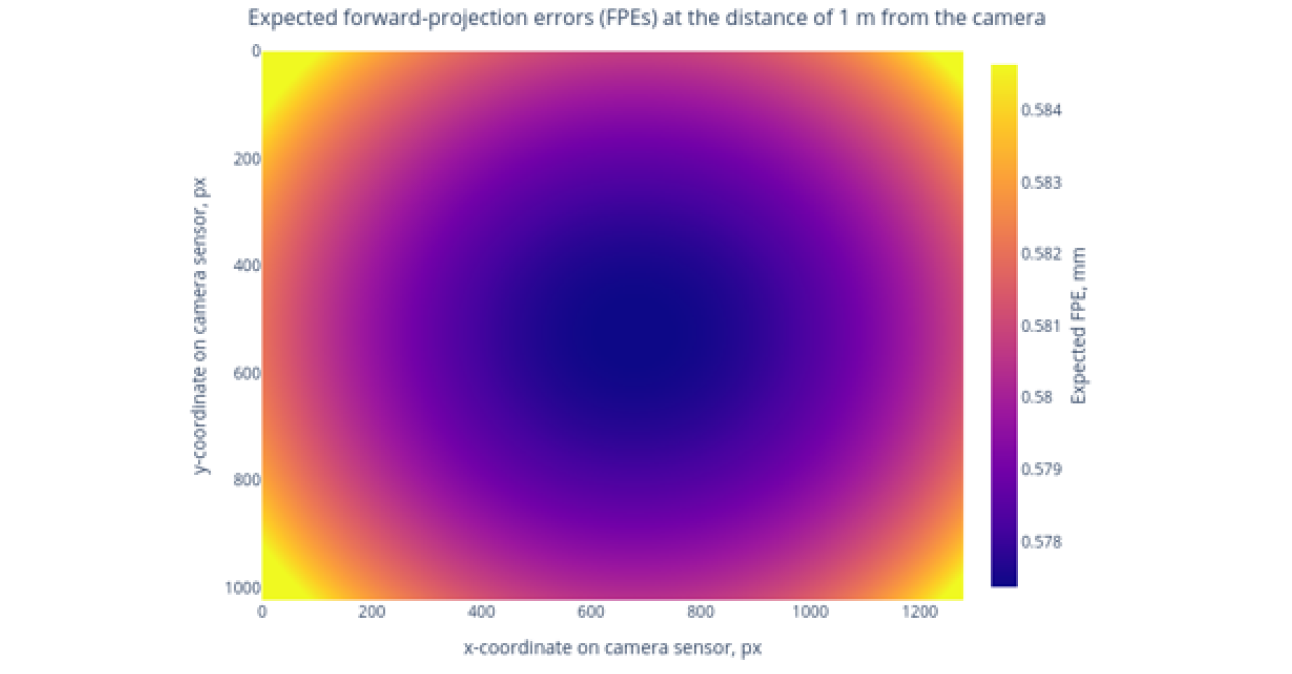
- Model repeatability: maps of expected FPE — uncertainty of each pixel's view ray at a given distance
Example re-projection error in each camera pixel.
Example forward re-projection error for each camera pixel depending on the distance.
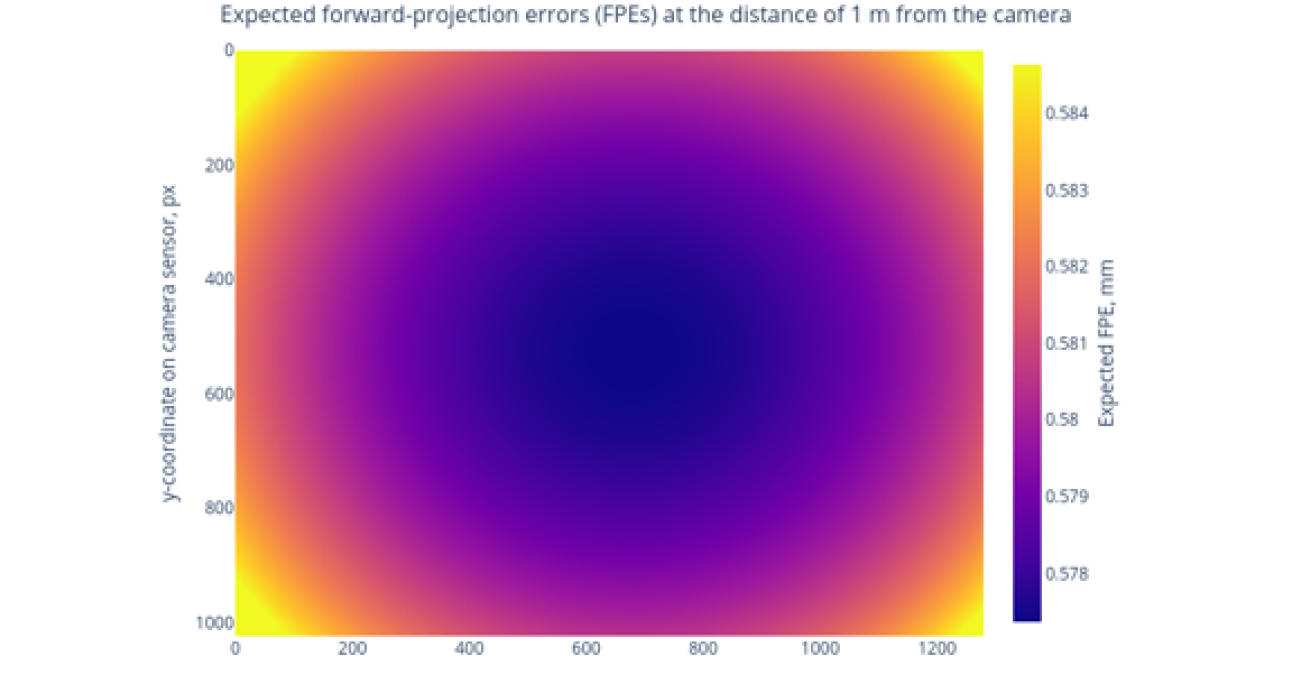
Example expected forward re-projection error for each camera pixel depending on the distance.